イメージセンサは一眼レフカメラやスマホに使われるようなイメージングだけに留まらず,様々な応用技術があり,様々な応用先で使われています.本記事ではこれらについて紹介していきます.

距離センサ
距離センサはカメラシステムから対象物までの距離を計測するためのセンサです.例としてよく使われるステレオカメラ,ToF (Time of Flight), 構造化照明型3Dカメラの3つについて解説します.
ステレオカメラ
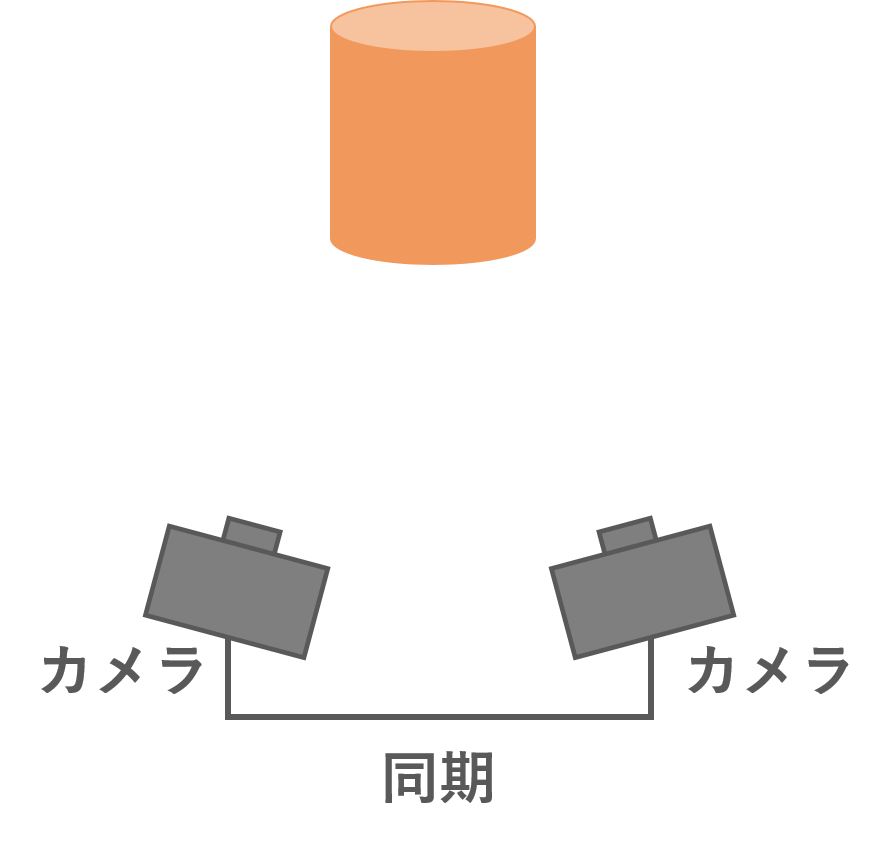
ステレオカメラは人間の目と同じように複数のカメラで撮影して,得た複数の画像は見ている位置が違う (視差)ため,この視差から対象物までの距離を三角測量を使用して計測する手法です.三角測量で距離を計測する手法として,2台のカメラを利用する他に1台のカメラと1台の光源の組み合わせで計測する手法もあります.
ステレオカメラのメリット
・通常のカメラで計測可能
・外での計測が可能
ステレオカメラのデメリット
・公正が必要
・背景光がないと計測できない
・対象物の形状に制限がある (平たい物など視差ができなものは計算できない)
・遠くまで計算する際には2台のカメラの距離も遠くしなければならない
・計算量が多い
ToF (Time of Filght)
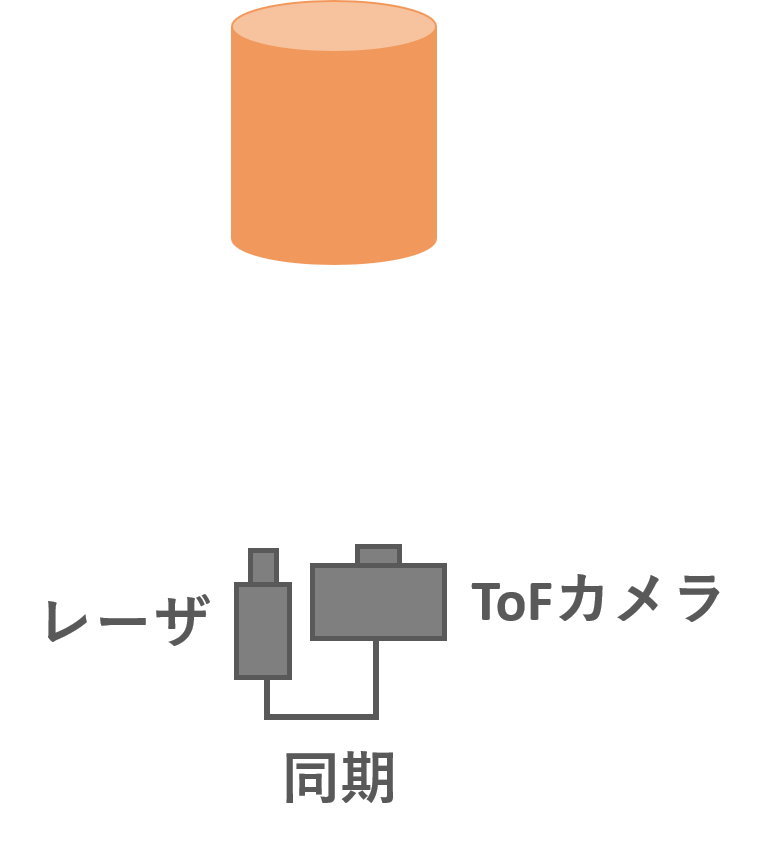
ToF (Time of Filght)はカメラと同期された光源から光を照射し,光が返ってくるまでの時間を計測し,光の速度は一定であることを利用して対象物までの距離を計測する手法です.ToFには直接に光の飛行時間を計測する直接ToF (dToF)と,複数の時間窓で計測してそれぞれの相対的な電荷の量を計測することで距離を計測する間接ToF (iToF)があります.
ToFのメリット
・距離レンジが広い
・暗い場所で計測可能
・計算がシンプル
・高速でリアルタイムに適している
・低コスト
・コンパクト
ToFのデメリット
・背景光に弱い
・黒い物体など光を反射しない対象物を計測できない
・マルチパスに弱い
構造化照明型3Dカメラ
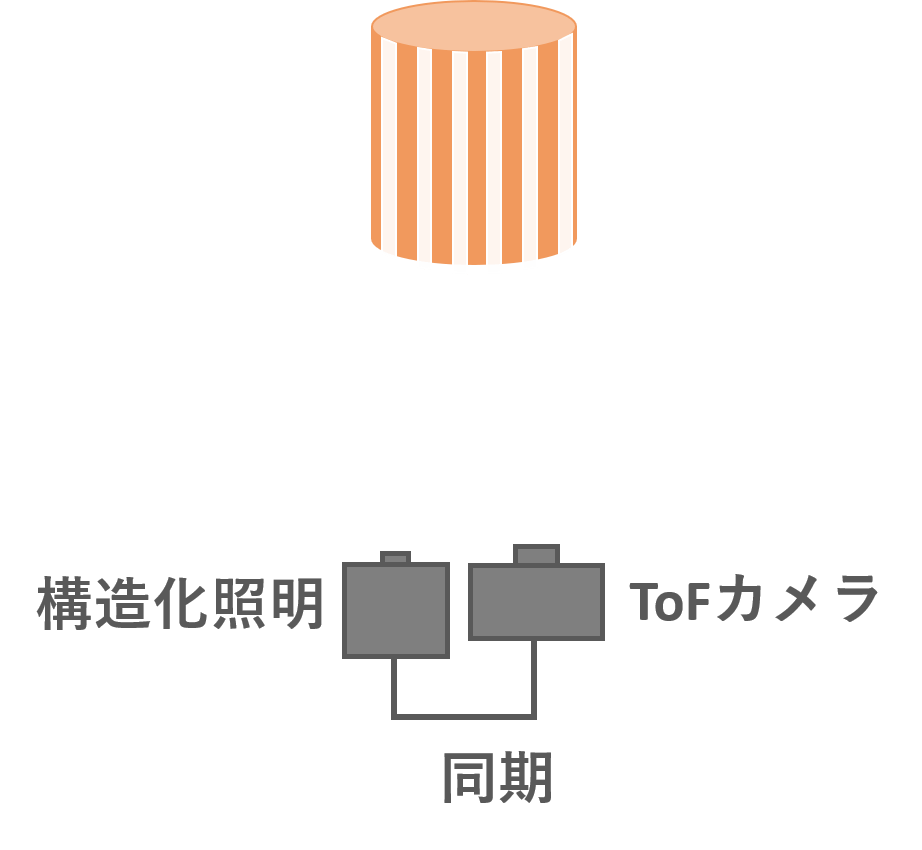
構造化照明型3Dカメラ (ストラクチャード・ライト方式)では予め決められたパターン光を照射して,投影されたパターンのひずみから距離を計算する手法です.
構造化照明型3Dカメラのメリット
・高精度
・暗い場所での計測が可能
構造化照明型3Dカメラのデメリット
・コンパクト性に欠ける (プロジェクターが必要)
・明るい場所で計測できない
可視光以外
通常のカメラでは人の目で見れる可視光のみを計測するようにしますが,それ以外の赤外線などを撮影して,通常では撮影できないことを実現させるセンサがあるので,紹介します.
赤外線カメラ
赤外線カメラはその名の通り赤外線を撮影するためのカメラです. 近赤外線カメラにより可視光では見えなかったものや区別の見えないものが見えたりします.
赤外線カメラはNIR (Near infrared:近赤外)や SWIR (Short wavelength infrared:赤外線短波長)が利用され,それぞれの波長が使われる際はNIRカメラやSWIRカメラとも呼ばれます.
赤外線カメラの応用例
・材料の識別 (砂糖と塩が区別して見える,薬の区別等)
・可視光では見えないリンゴの傷が見える
・手首の血管のより鮮明な撮影
・水分の検出 (コップに入った水が見える等)
・透過検査 (ICカードやシリコンウェーハ等)
・高温の測定
・霧の中でもより鮮明に撮影可能
・暗闇の中でも赤外線LEDを利用することで撮影可能
サーマルカメラ
人や物は温度に応じて赤外線などを放出しますが,この赤外線を計測することで対象物の温度を計測するカメラがサーマルカメラです.
紫外線 (UV)カメラ
紫外線 (UV)カメラは紫外線を撮影するためのカメラです.紫外線 (UV)カメラは対象物の表面の傷や汚れの検査に用いられます.紫外線は可視光と比べると波長が短く (エネルギーが高く),表面でより吸収・拡散反射されやすいのでコントラストが強くなるためです.
その他の可視光以外
その他の可視光以外を利用する応用として,x線を計測するx線計測器や,容量を計測する容量イメージセンサなどがあります.
ビジョンセンサ
ビジョンセンサは画像そのものを得るだけではなく,データの認識までを行うセンサです.ビジョンセンサとしてセンサチップにAI機能を組み込んだインテリジェントビジョンセンサやセンサ内でエッジ処理やパターンマッチングを行うものがあります.
イベントベースビジョンセンサ (EVS)
イベントベースビジョンセンサ (EVS)は前のフレームより一定数明るくなったときか暗くなった場合のみ出力して,エッジのみの画像を得ることができるセンサです.EVSでは低消費電力などの特徴があり,また自動運転などでAIと組み合わせることなどで注目されています.
その他
偏光センサ
偏光センサは光を偏光フィルタにより偏光した画像を得ることができるセンサです.偏光センサでは水面などの反射をカットした画像が得られたり,物体の角度がわかる,影がある場所での人などの検知,レンズなどの歪みの撮影など通常のカメラでは撮影できない画像を取得することができます.
色分離型イメージセンサ (三層型イメージセンサ)
通常のイメージセンサではベイヤー配列などで各画素にカラーフィルタがあることで赤・緑・青の色分けををしますが,色分離型イメージセンサ (三層型イメージセンサ)では光の波長 (色)によってセンサで電荷の発生する平均の深さが違うことを利用して,カラーフィルタなしで各層で発生した電荷で色分けをするイメージセンサです.この方式では解像度を上げやすい,カラーフィルタで光を吸収することがないため光の利用効率が高くできる,分光特性がベイヤー配列と比較して広がりを持つなどの特徴がある.
有機膜イメージセンサ
有機膜イメージセンサは有機膜で電荷変換させるイメージセンサです.色分離イメージセンサの一つの色を有機膜で電荷変換させるなどでも利用されます.
応用先一覧
通常の単眼カメラや以上で説明したイメージセンサは以下のような場所で応用されます.もちろん応用される場所によって要求される特性も変わってきます.例えばオートモーティブは自動車等での応用ですが,この場合は振動や高熱にも耐えられなければいけません.またイメージセンサの応用先はさらに広がりつつあり,医療・生体では様々な計測や処理による工夫でガン,やけどなどの診断やトモグラフィーなどに応用する研究がされています.
イメージセンサの応用先
・ FA (ファクトリーオートメーション)
・ オートモーティブ
・ セキュリティ
・ 医療・生体
・ 顔認証
・ 科学 (宇宙等)
まとめ
- ステレオカメラ:複数のカメラの視差を利用して距離を計測する手法
- ToF (Time of Filght):光を照射して返ってくるまでの時間を計測することで距離を計測する手法
- 構造化照明型3Dカメラ:パターン光を照射して,投影されたパターンのひずみから距離を計測する手法
- 赤外線カメラ:赤外線を撮影するためのカメラ
- サーマルカメラ:対象物から放出される赤外線を計測することで,対象物の温度を計測するためのカメラ
- 紫外線 (UV)カメラ:紫外線を計測するためのカメラ
- ビジョンセンサ:ビジョンセンサは画像そのものを得るだけではなく,データの認識までを行うセンサ
- イベントベースビジョンセンサ (EVS):明るさの変わったエッジのみを撮影するためのセンサ
- 偏光センサ:偏光した光の画像を取得できるセンサ
- 色分離型イメージセンサ:電荷の発生する深さで色分離をするイメージセンサ
- 有機膜イメージセンサ:有機膜で電荷変換させるイメージセンサ